
Почему датчик тока является обязательным условием для коллаборативных, мобильных роботов?
Роботы все чаще используются на производственных и складских предприятиях. На предприятиях все шире используются мобильные роботы для автономного перемещения предметов из точки А в точку Б без участия человека, а также коллаборативные роботы, позволяющие повысить эффективность труда и снизить утомляемость работников. Датчики тока играют важную роль в мобильных и коллаборативных роботах, помогая реализовать эти преимущества.
Мобильные роботы обычно работают от литий-ионных батарей с напряжением от 48 В до 80 В на основных шинах питания и могут испытывать высокие пусковые токи, превышающие 150 А на основной шине. Вторичные шины мобильных роботов могут использовать напряжение от 3,3 В до 80 В для питания периферийных устройств, таких как освещение, двигатели, системы технического зрения, центральный процессор, память и другие соответствующие подсистемы. Уровни тока на вторичных шинах обычно намного ниже, в диапазоне десятков ампер.
С другой стороны, коллаборативные роботы обычно работают от 24 В до 60 В. Уровень тока в системе – в частности, ток в электродвигателях – обычно составляет около 20 А или менее на источник. Точные измерения тока имеют гораздо большее значение для коллаборативных роботов, поскольку высокая точность обеспечивает жесткий контроль системы для безопасной и эффективной работы робота.
Датчики тока играют важную роль в робототехнических системах для таких случаев, как измерение фазного тока в моторном приводе, системы управления батареями и общий мониторинг периферийных устройств.
Моторные приводы в мобильных и коллаборативных роботах
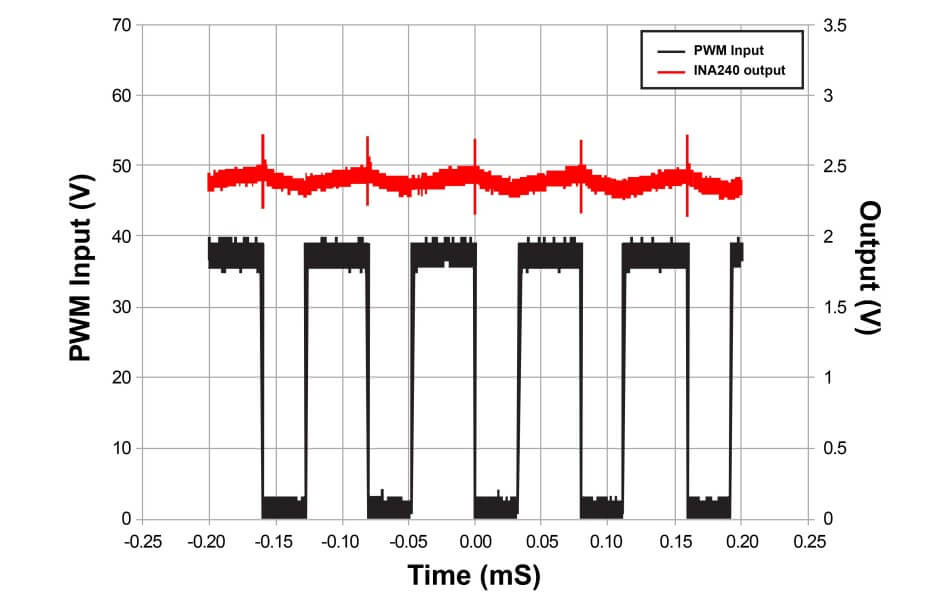
В системах управления двигателями токоизмерительные интегральные схемы (ИС, ICs) теперь имеют передний фронт, который использует технологию, называемую улучшенное подавление широтно-импульсной модуляции (ШИМ, PWM). Эта технология минимизирует выходную ошибку, вызванную коммутацией синфазных сигналов, которые очень часто встречаются при измерении фазового тока входной линии. Как показано на рисунке 1, она улучшает такие электрические характеристики, как сдвиг, погрешность усиления и температурный дрейф, обеспечивая такие преимущества, как повышенная производительность системы и сверхточные измерения.
При более детальном рассмотрении моторного привода на рис. 2 показаны пять потенциальных мест установки токочувствительных ИС в трехфазных моторных системах мобильных или коллаборативных роботов. Начиная с верхнего левого угла находится канал постоянного тока высокой точки, который не зависит от фазы и контролирует токовые нагрузки в общей системе двигателя, а также условия короткого замыкания. Последующая реализация датчика тока находится на высокой точке каждой фазы, контролируя ток, поступающий в каждую фазу двигателя. Мониторинг каждой фазы позволяет системе лучше определить, какая фаза может работать неправильно. Для измерений на высокой точке токочувствительные микросхемы обычно используют самые высокие уровни напряжения в системе.
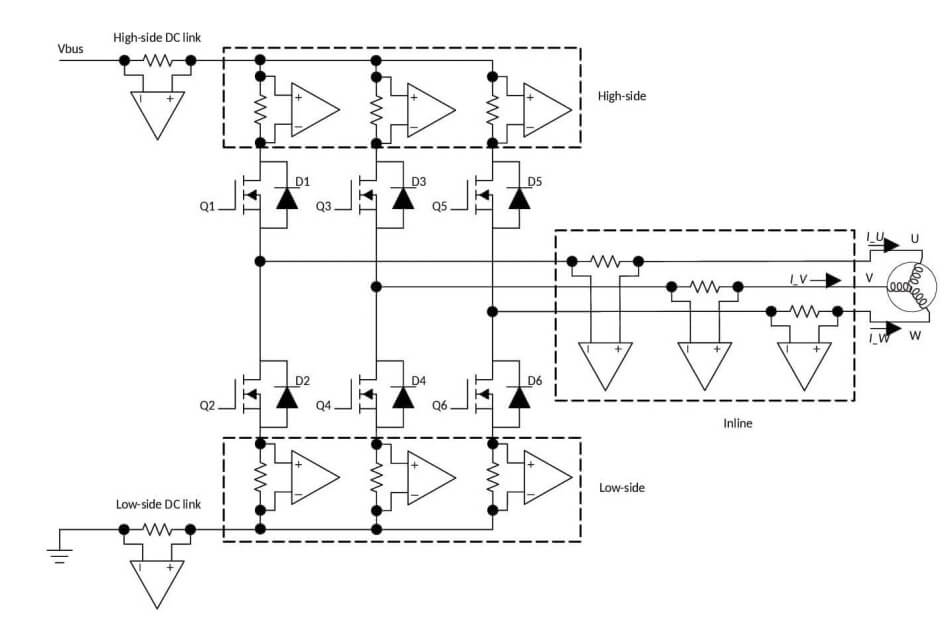
Перемещение в центр рисунка 2 – это контроль синфазного тока, который позволяет создать замкнутую систему обратной связи. Контроллер теперь может управлять системой на основе синфазных уровней тока, что обеспечивает более жесткие возможности управления. Трудность при последовательном измерении тока двигателя заключается в коммутируемом синфазном сигнале; однако технология подавления ШИМ может помочь смягчить ошибку, которую может генерировать сигнал ШИМ, в дополнение к измерению высокого синфазного напряжения до 110 В, аналогично измерению высокой точки. Эти особенности облегчают внедрение этих ИС в систему и повышают общую эффективность, обеспечивая более жесткий контроль системы.
Последние конфигурации на рис. 2 – это фаза низкой точки и канал постоянного тока низкой точки. Измерения на низкой точке обычно выполняются при более низких уровнях напряжения, поскольку ИС находятся близко к земле; эти ИС могут контролировать ток на низкой точке. Мониторинг на низкой точке дает целостное представление об измерениях тока в системе; он также обеспечивает более низкие уровни защиты и управления после нагрузки. В системе двигателя можно использовать одну или несколько таких конфигураций.
Обнаружение точки нагрузки в мобильных и коллаборативных роботах
На рисунке 3 показано, как система мобильного робота может контролировать периферийные устройства, такие как освещение, радар, системы обработки и другие соответствующие подсистемы. Как правило, система питания обеспечивает питание постоянного тока для вторичных шин и каналов. Питание подается на DC/DC-преобразователь постоянного тока, а затем на переключатель нагрузки, который подключает и отключает нагрузку от источника для экономии энергии и повышения эффективности, когда периферийное устройство не нужно.
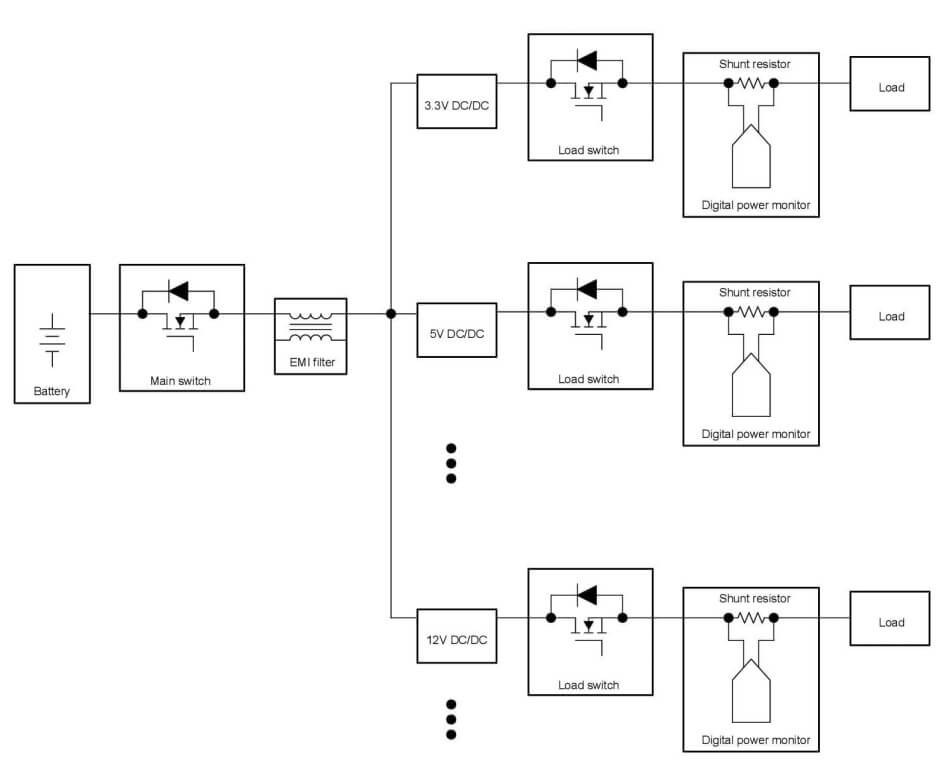
Когда переключатель включен, токочувствительная микросхема отслеживает ток и напряжение, проходящие через переключатель, и передает напряжение, ток, мощность и другую важную информацию обратно в микроконтроллер через I2C (последовательная асимметричная шина для связи между интегральными схемами внутри электронных приборов). Эти данные помогают обеспечить здоровье системы и ее максимальную эффективность. Здесь можно использовать и токочувствительную ИС, но в большинстве случаев для этого потребуется дополнительное оборудование, например, аналого-цифровой преобразователь (АЦП, ADC) или вход/выход общего назначения на микроконтроллере. Однако в особых случаях, когда требуется быстрое обнаружение перегрузки по току, токочувствительная ИС имеет 1-µs компаратор.
Новые тенденции в сфере безопасности роботов
Международная организации по стандартизации (ISO) 3961-4 устанавливает требования безопасности для мобильных роботов без водителя и их систем для складской робототехники, а стандарт ISO 15066 определяет требования безопасности для коллаборативных систем промышленных роботов и их рабочей среды. Стандарты ISO отличаются, поскольку способность мобильных роботов перемещаться по складу или территории со значительно большим количеством степеней свободы может привести к увеличению вероятности инцидента с роботом.
Учитывая стандарты ISO, ИС Automotive Electronics Council (AEC)-Q100 могут помочь обеспечить высочайшее качество ИС, а также надежность информации, которую генерируют эти ИС.
Использование датчиков тока в мобильных или коллаборативных роботизированных платформах может повысить безопасность и эффективность, снизить утомляемость работников и помочь контролировать состояние системы. При внедрении ИС с датчиками тока возникают проблемы, такие как размер, но минимизировать ограничения по размеру можно с помощью корпусов на малогабаритных транзисторах SOT-23 или SC-70.
Использование микросхем датчиков тока может помочь разработчикам расширить возможности, обеспечив жесткий контроль и мониторинг состояния. Линейка датчиков тока постоянно расширяется, и по мере дальнейшего развития технологий использование датчиков тока будет становиться все более актуальным, поскольку все больше электроники будет нуждаться в мониторинге.
Статья Kyle Stone с сайта www.edn.com, 18 ноября 2022 г.
Перевод подготовила Елена Михаленко
ФОТО: https://www.edn.com/why-current-sensing-is-a-must-in-collaborative-mobile-robots/
Печатная версия статьи из №2 (18) газеты “Вестник бизнеса”